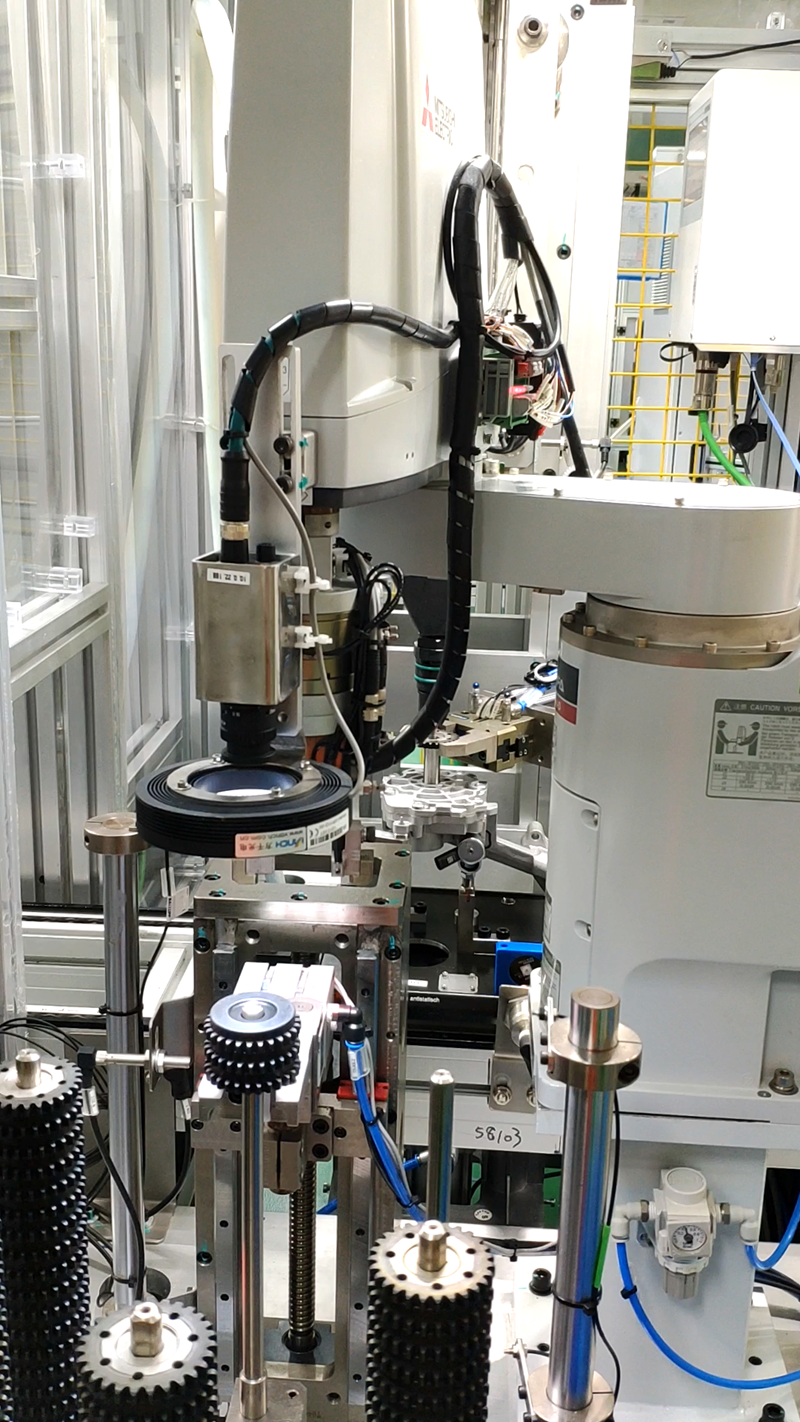
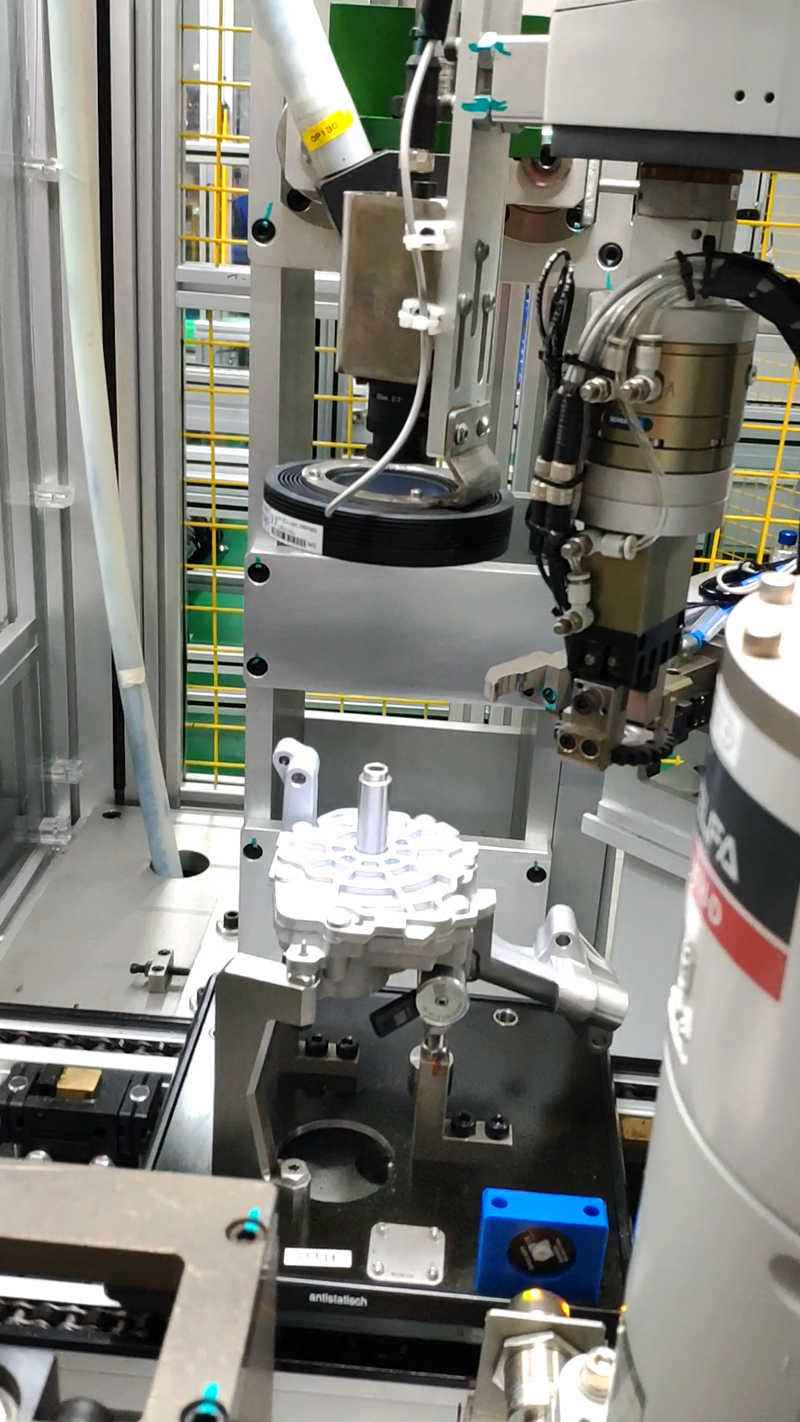
机器人通过视觉引导自动装配链轮
发表日期:2019-05-23 13:35 文章编辑:admin 浏览次数:
通过工业相机视觉引导,查找和计算链轮缺口位置,完成抓取引导。再通过视觉检查和计算出转子缺口位置,机器人对位置进行计算后完成链轮和转子轴缺口的对位,完成高精度装配,链轮和转子轴配合公差小于2丝(0.02mm),角度误差±0.5度以内。



标签:链轮装配,机器人装链轮,齿轮装配,机器人视觉
如没特殊注明,文章均为极可原创,转载请注明来自http://www.shgeek.cn/cases/car/2019/0522/35.html
 咨询邮箱:admin@shgeek.cn
咨询邮箱:admin@shgeek.cn  咨询热线:021-34788138
咨询热线:021-34788138 
